
2.12 Mobile Robot
Category: Robotics / Embedded Systems
Tools Used: C++, Jetson Nano, ROS2, ESP32, OpenCV
Project date: May 2025
Project Overview
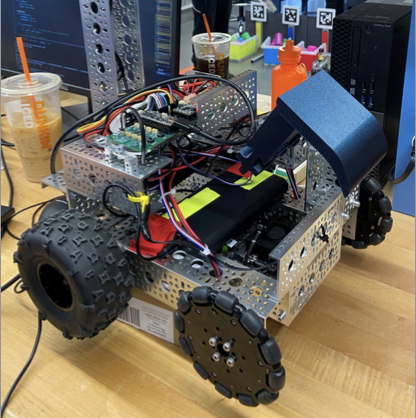
This robot was designed for the final competition in MIT's 2.12 Intro to Robotics course. As a team of five, we were tasked with autonomously navigating a course, grabbing bins, and transporting them to designated zones.
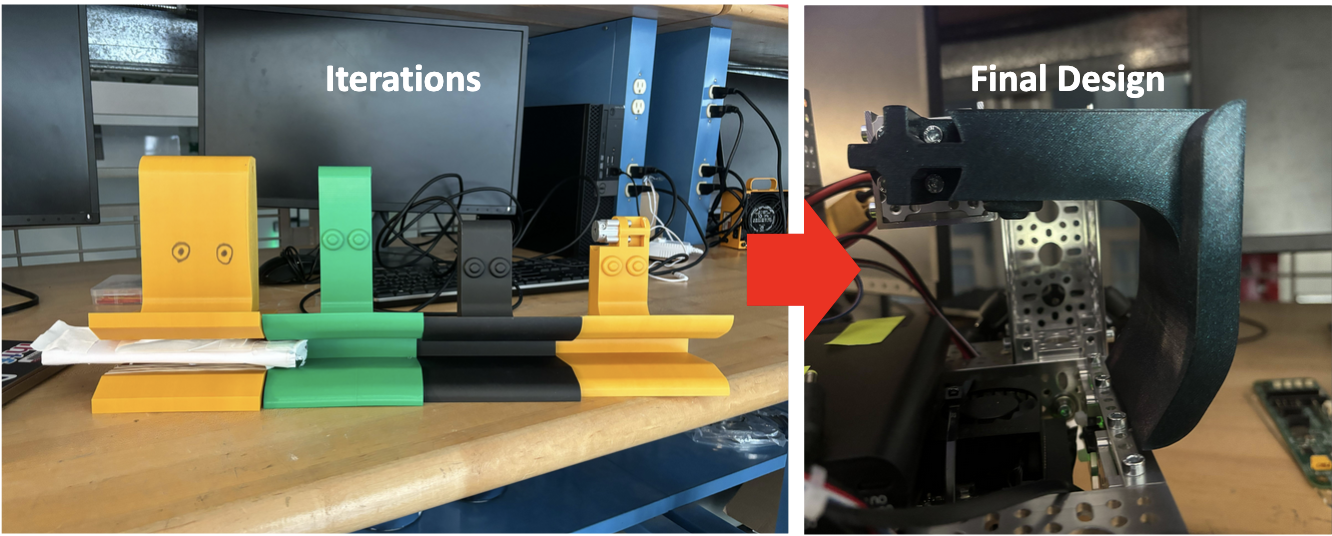
The platform used a two-wheel, rear-powered tank drive and a custom-designed end effector driven by a 60RPM high-torque servo to drag bins across the field. Our robot featured a Time-of-Flight sensor for short-range detection, an IMU for orientation, and a camera system mounted on a Jetson Nano for AprilTag pose estimation.
Software Architecture
The system was divided between low-level embedded motor/sensor control on an ESP32 and high-level perception, logic, and state management on the Jetson. I led the development of the low-level codebase and helped debug integration across the two systems using wireless communication.
Although our full autonomous state machine was not completed due to time constraints, we successfully developed and tested core subsystems including pose localization, bin detection, and bin pickup routines. During the competition, we were able to run all these subsystems separately and then take over manual drive when needed for small corrections.
Performance & Design
Fun Photos

